
Above: Collection of ultrasound data of the human hand.
While human kinematics can be measured to a significant extent using motion capture, there does not yet exist a system that can predict human dynamics (including contact forces and joint torques) using non-invasive sensing during manipulation tasks. A system that can predict these forces is vital to the creation of safe and effective prosthetic and exoskeletal devices and would revolutionize our ability to interpret a wide range of manipulation and HRI tasks.
Thus, the ultimate goal of this research is to create a musculoskeletal model of the human arm that is a) simple and recoverable while accurately predicting the kinematics and dynamics of the system and accommodating pathology, and b) non-reliant on literature values or population measures. Based on these objectives, the HART Lab is currently undertaking the two projects below.
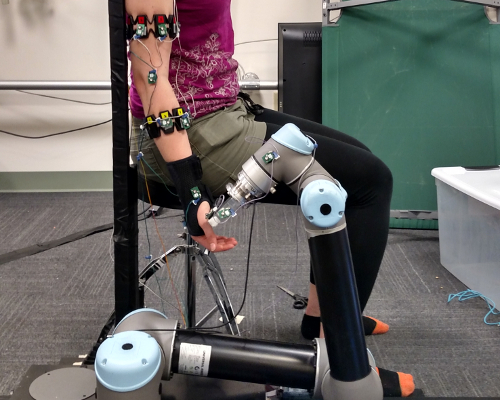
Current human dynamical models are often built on an amalgamation of literature values, assumptions drawn from cadaver studies, and population measures, and they generally cannot accommodate significant musculoskeletal pathologies (or even healthy morphological variation). In this project, we employ a wide range of sensing technologies — including surface electromyography (sEMG), motion capture, ultrasound, and magnetic resonance imaging (MRI) — to extract morphological parameters, kinematic data, and measures of muscle activation to generate dynamical models. Ultimately, we hope to rely on no literature values or non-structural assumptions whatsoever. (Image: Surface EMG, force, and motion capture data collection.)
While there exist several frameworks that grossly predict human dynamics (e.g., OpenSim, AnyBody), there does not yet exist a framework to quantify a) the errors in morphology associated with these or other modeling techniques, and b) to what extent these errors generate corresponding simulation inaccuracies. The objective of this project is therefore to examine
· to what extent musculoskeletal morphology varies across subjects;
· to what extent existing software can account for this variation; and
· to what extent this variation influences the resultant dynamical model.
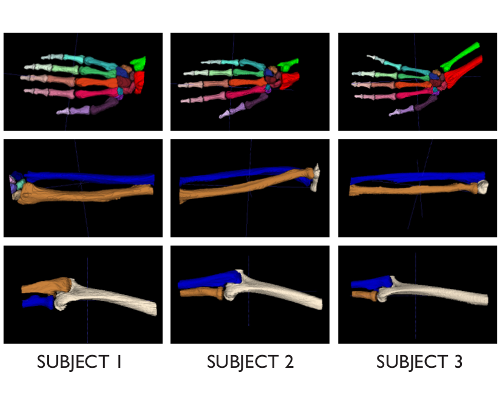
To achieve these objectives, we are currently analyzing upper-limb MRI scans of a small cohort of subjects to precisely characterize each subject's morphological parameters of interest (i.e., those most likely to impact system dynamics), generate an expanded library of models via perturbation, and determine the impact of parameter values and resolution on predicted dynamics, allowing us to more fully understand how measurement inaccuracies impact human dynamical models in general.
This work is carried out in collaboration with Stanford Robotics. (Image: Morphological differences of three subjects' arm skeletons, as reconstructed from MRI data.)
Laura Hallock, Akira Kato, and Ruzena Bajcsy. Empirical quantification and modeling of muscle deformation: Toward ultrasound-driven assistive device control. In IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2018.
Laura Hallock, Robert Matthew, Sarah Seko, and Ruzena Bajcsy. Sensor-driven musculoskeletal dynamic modeling. In International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC). IEEE, 2016. (poster)
Laura Hallock, Robert Matthew, Sarah Seko, and Ruzena Bajcsy. Sensor-driven musculoskeletal dynamic modeling. 2016.
