
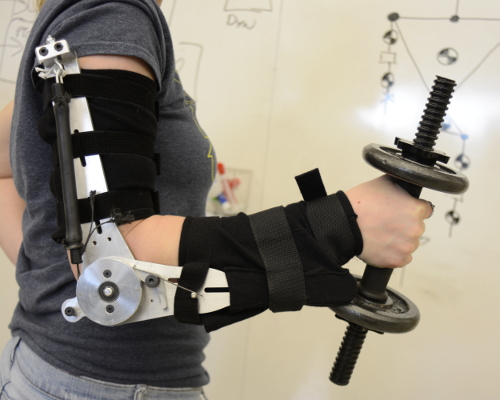
Above: APEX Gamma exoskeleton.
Today, most medically assistive exoskeletons on the market are expensive, heavy, and offer little patient customization. Even when customized, these devices largely rely on qualitative and subjective modeling metrics.
At the HART Lab, we address these issues in a two-step process, first generating descriptive human models, then using them to generate a prescription for an individualized assistive device like those listed below. Because individuals with upper-limb impairments represent a large patient group — including those with muscular dystrophy, stroke patients, and spinal cord injury survivors — and experience challenges greatly detrimental to their quality of life, our primary focus is on the creation of upper-limb exoskeletons.
The exoskeletons below operate with minimal power requirements and leverage the residual strength of the user. This is beneficial both because the exoskeletons remain lightweight and cost-effective (without heavy, expensive motors) and because they allow the user to exercise their remaining muscles to prevent further atrophy.
Some projects are in collaboration with the Mechanical Systems Control Lab.
PEX is a completely passive (i.e., unpowered) elbow exoskeleton designed for patients who have residual strength in their impaired limb but lack strength in one or more directions of actuation (e.g., SCI survivors who are able to control the biceps but not the triceps). The exoskeleton operates through a system of elastic bands that provide support in the impaired direction(s) at a discretized number of stiffnesses. (Image: PEX Beta exoskeleton.)

APEX is an active/passive (or “pseudopassive”) exoskeleton. The device is only powered when the level of support is changed by the user; otherwise, stiffness is maintained indefinitely using pneumatic cylinders with no power consumption. By changing this level of support, the user can precisely and significantly increase their range of motion and expand their ability to perform tasks of daily living. APEX assists at both the shoulder and the elbow, and, like PEX, is designed for users who retain some residual strength. (Image: APEX Gamma exoskeleton.)
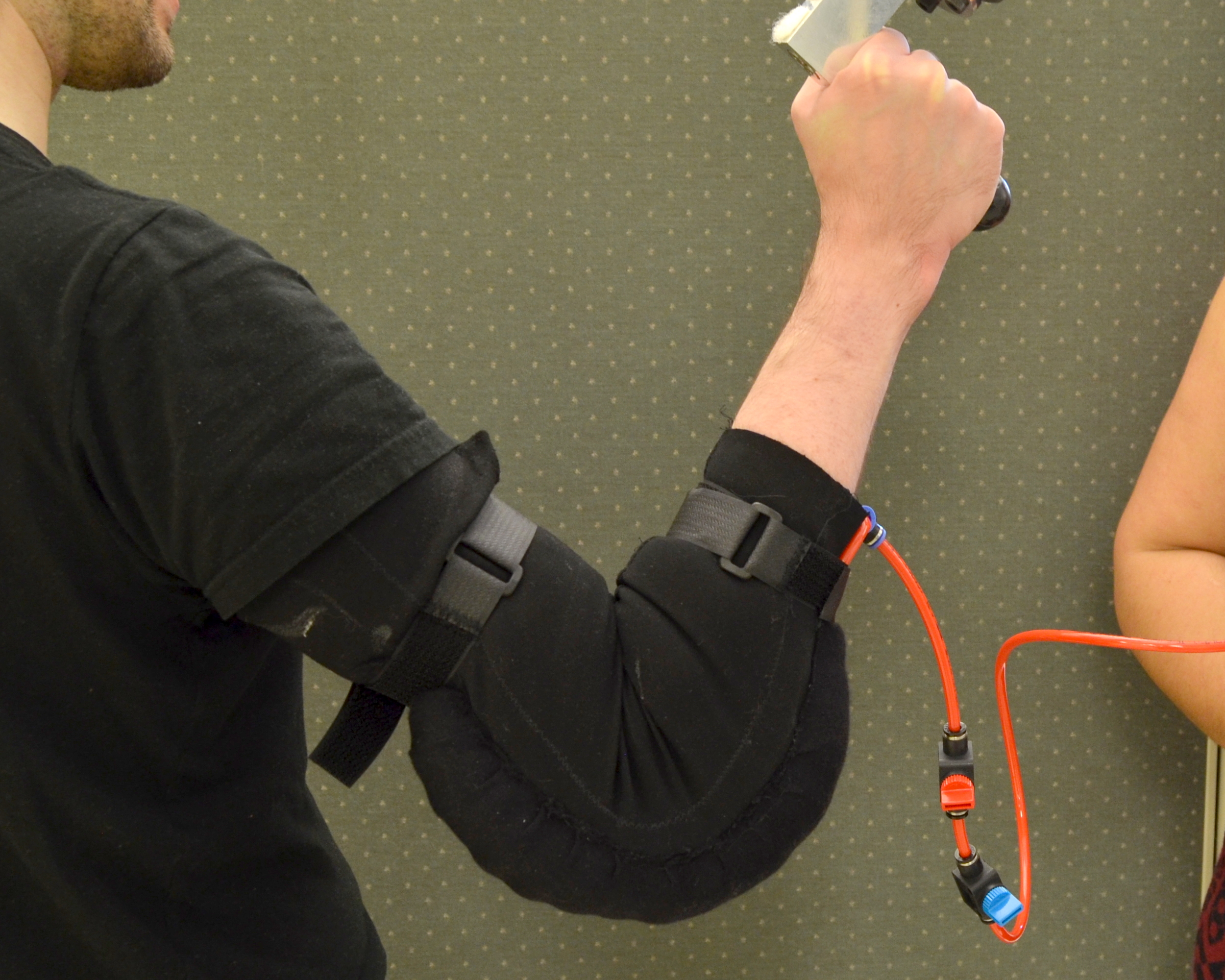
The soft exoskeleton uses soft pneumatics — a form of actuation with the potential to more safely and more ergonomically interface with the human body than rigid structures — to aid in elbow flexion. The HART Lab is also investigating additional applications for soft robotics. (Image: Soft exoskeleton.)
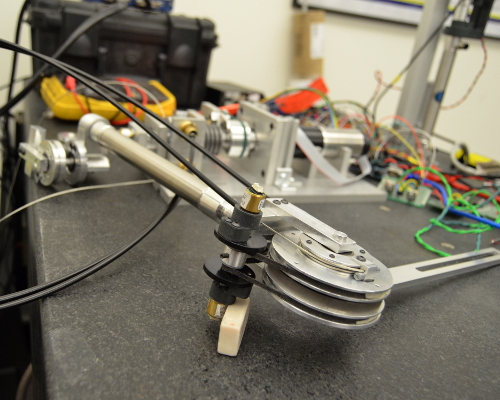
In addition to the passive and pseudopassive exoskeletons above, an active testbed (using offboard electric motors) is currently under construction. Because electric motors can provide a wider range of support than the passive actuation elements above, the active system can be used to simulate different possible configurations of PEX and APEX to determine the best fit for an individual user. Based on this information, a customized passive or pseudopassive exoskeleton can then be constructed.
Looking to the future, this system could also be adapted into a fully active exoskeleton for users with little to no remaining muscle strength. The HART Lab is currently exploring ways to control such an exoskeleton through the neural activity of the user. (Image: Active testbed.)
Robert Peter Matthew, Eric John Mica, Waiman Meinhold, Joel Alfredo Loeza, Masayoshi Tomizuka, and Ruzena Bajcsy. Introduction and initial exploration of an active/passive exoskeleton framework for portable assistance. In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 5351–5356. IEEE, 2015.
Robert Peter Matthew, Eric John Mica, Waiman Meinhold, Joel Alfredo Loeza, Masayoshi Tomizuka, and Ruzena Bajcsy. Initial investigation into the effect of an active/passive exoskeleton on hammer curl performance in healthy subjects. In International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), pages 3607–3610. IEEE, 2015.
Robert Peter Matthew, Eric John Mica, Waiman Meinhold, Joel Alfredo Loeza, Masayoshi Tomizuka, and Ruzena Bajcsy. Preliminary tests of the active/passive exoskeleton (APEX-α). In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2015.
Robert Peter Matthew, Victor Shia, Masayoshi Tomizuka, and Ruzena Bajcsy. Optimal design for individualised passive assistance. In Proceedings of the 6th Augmented Human International Conference, pages 69–76. ACM, 2015.
