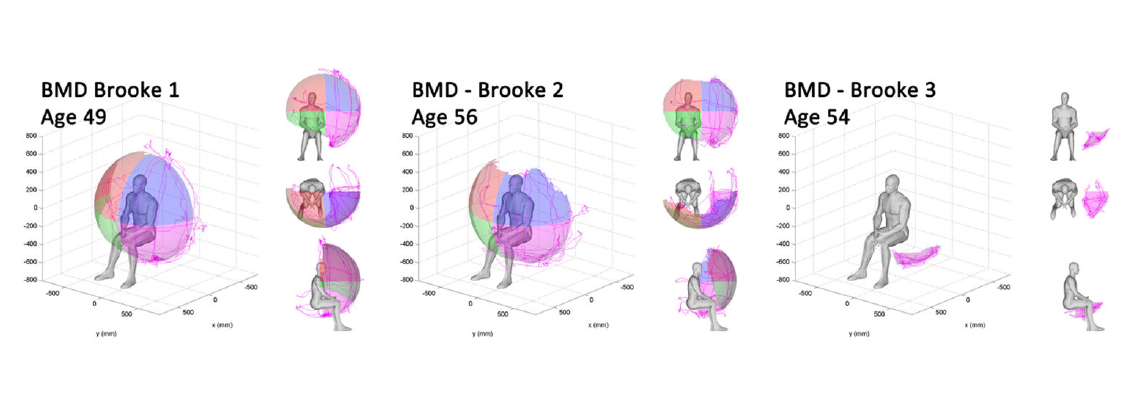
Above: Reachable workspace of Becker's muscular dystrophy patients.
Individuals who suffer from movement disorders (e.g., muscular dystrophy patients and stroke survivors) exhibit a wide range of musculoskeletal pathologies that are poorly characterized by existing modeling techniques. Doctors and clinicians, for example, rely on simple, overarching classifications like the Brooke scale — a set of six numbers — to diagnose patients’ abilities and prescribe treatments.
Thus, our team is working to develop a system for human kinematic and dynamic modeling that quantifies differences in patient abilities, describing both variation of a single individual (e.g., with age, injury, or disease progression) and variation across individuals. By observing patients’ movement (via motion capture) and corresponding ground reaction forces, we are able to create a high-resolution model of each individual’s range of motion (“reachable workspace”) and estimates of limb length and mass. We are also exploring more sophisticated measurements of multi-contact forces to better quantify patients’ strength.
We are currently working toward several applications for this work:
Healthcare metrics and patient database. These models offer not just the potential to track an individual’s disease progression, but to compare patients with those in a similar cohort to better evaluate treatment efficacy. Our team is currently collaborating with the UC Davis Medical Center to build a database of these models that can leverage existing data analytics technology to improve patient diagnosis and treatment.
Individualized exoskeleton creation. Our team is leveraging these modeling techniques to inform the design of “prescriptive” exoskeletal assistive devices.
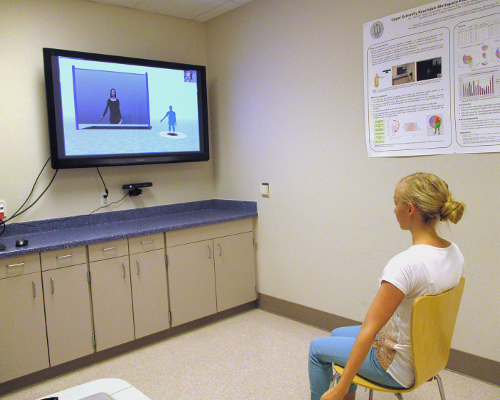
This project is carried out in collaboration with the UC Davis Medical Center. (Image: Reachable workspace data collection.)
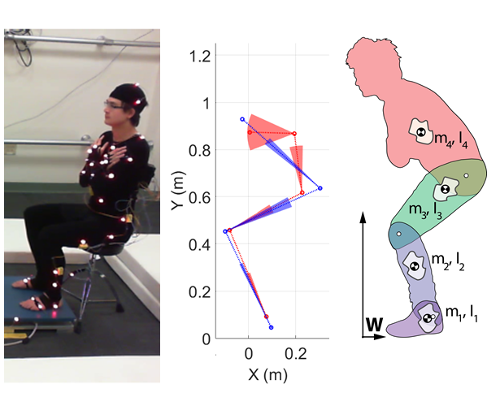
In addition to the reachable workspace characterization described above, our team is working to develop individualized models of specific tasks relevant to daily living, including sit-to-stand motions and grasping of common objects. By combining the motion capture and force measurement methodologies described above with algorithms for recovery of dynamic parameters (e.g., masses of limbs), we can precisely characterize regions of stability (e.g., to help identify risk of falling) and limb capability. (Image: Dynamic recovery during sit-to-stand motion.)
Robert Peter Matthew, Victor Shia, Gentiane Venture, and Ruzena Bajcsy. Generating physically realistic kinematic and dynamic models from small data sets: An application for sit-to-stand actions. In International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), pages 2173–2178. IEEE, 2016.
Jay J Han, Evan De Bie, Alina Nicorici, Richard T Abresch, Ruzena Bajcsy, and Gregorij Kurillo. Reachable workspace reflects dynamometer-measured upper extremity strength in facioscapulohumeral muscular dystrophy. Muscle & nerve, 52(6):948–955, 2015.
Jay J Han, Gregorij Kurillo, Richard T Abresch, Evan De Bie, Alina Nicorici, and Ruzena Bajcsy. Upper extremity 3-dimensional reachable workspace analysis in dystrophinopathy using Kinect. Muscle & nerve, 52(3):344–355, 2015.
Jay J Han, Gregorij Kurillo, Richard T Abresch, Evan Bie, Alina Nicorici, and Ruzena Bajcsy. Reachable workspace in facioscapulohumeral muscular dystrophy (FSHD) by Kinect. Muscle & nerve, 51(2):168–175, 2015.
Robert Matthew, Gentiane Venture, and Ruzena Bajcsy. A geometric approach for deriving multicontact dynamic identification models. 2015.
Robert Peter Matthew, Gregorij Kurillo, Jay J Han, and Ruzena Bajcsy. Calculating reachable workspace volume for use in quantitative medicine. In European Conference on Computer Vision, pages 570–583. Springer International Publishing, 2014.
Victor Shia, Robert Peter Matthew, Ram Vasudevan, and Ruzena Bajcsy. Relaxing global decrescence conditions in Lyapunov theorems for hybrid systems. IFAC Proceedings Volumes, 47(3):5998–6006, 2014.
Jay J Han, Gregorij Kurillo, R Ted Abresch, Alina Nicorici, and Ruzena Bajcsy. Validity, reliability, and sensitivity of a 3D vision sensor-based upper extremity reachable workspace evaluation in neuromuscular diseases. PLoS currents, 5, 2013.
Gregorij Kurillo, Alic Chen, Ruzena Bajcsy, and Jay J Han. Evaluation of upper extremity reachable workspace using Kinect camera. Technology and Health Care, 21(6):641–656, 2013.
Gregorij Kurillo, Jay J Han, Richard T Abresch, Alina Nicorici, Posu Yan, and Ruzena Bajcsy. Development and application of stereo camera-based upper extremity workspace evaluation in patients with neuromuscular diseases. PloS one, 7(9):e45341, 2012.
