
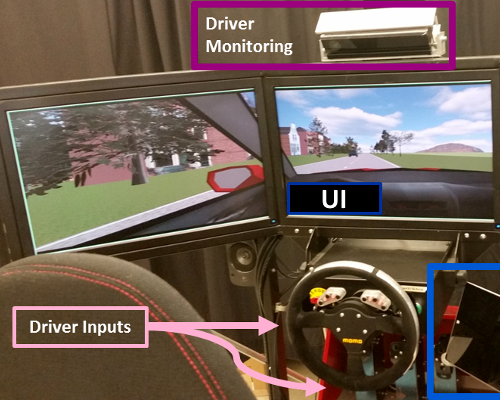
Above: Instrumented car simulation system, used in characterization of human-car interactions.
While the creation of fully-autonomous cars — requiring no human input whatsoever — is a popular area of research, these vehicles will be operating in an environment with pedestrians, passengers, and other human drivers. Thus, the HART Lab takes a human-centered approach to the design of intelligent vehicles and is exploring both semiautonomous and fully autonomous systems.
The vast majority of drivers now (and in the foreseeable future) remain human. The goal of this project is to develop a system that can determine the driver’s state (attentive, partially attentive, or distracted) and decide when to intervene.
To accomplish this, the driver and the car are abstracted as a “human-in-the-loop” system, in which a number of sensors are used to track the driver’s motion and gaze. These sensor readings are then compared against (and incorporated into) a database of past readings and their corresponding car trajectories to predict what the driver may potentially do next. Based on this information, the system can decide whether to take over the vehicle or allow the driver to remain in control. (Image: Driver monitoring system in car simulator.)
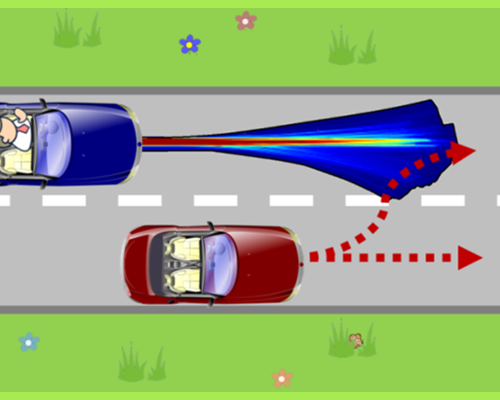
While the semiautonomous system above characterizes the interactions between a single driver and their vehicle, the HART Lab is also exploring the interactions between multiple human drivers and fully autonomous vehicles on the road. Using ideas from reachable set theory and legible motion, we aim to improve safety in these interactions by implementing autonomous control systems that act in a way that other drivers expect. (Image: Autonomous car (red) using human-controlled car's estimated reachable set to make a decision when changing lanes.)
Vijay Govindarajan, Katherine Driggs-Campbell, and Ruzena Bajcsy. Balancing Robustness and Utility in Reachability Analysis for Human-in-the-Loop Systems. In IEEE Conference on Decision and Control (CDC). IEEE, 2017.
Katherine Driggs-Campbell, Vijay Govindarajan, and Ruzena Bajcsy. Integrating Intuitive Driver Models in Autonomous Planning for Interactive Maneuvers. In Special Edition Transactions on Intelligent Transportation Systems: Applications and Systems for Collaborative Driving, pages 1-12. IEEE, 2017.
Tara Rezvani, Katherine Driggs-Campbell, and Ruzena Bajcsy. Optimizing Interaction Between Humans and Autonomy via Information Constraints on Interface Design. In IEEE 20th International Conference on Intelligent Transportation Systems (ITSC). IEEE, 2017.
Katherine Driggs Campbell and Ruzena Bajcsy. Tools for Trustworthy Autonomy: Robust Predictions, Intuitive Control, and Optimized Interaction. 2017.
Tara Rezvani, Katherine Driggs-Campbell, Dorsa Sadigh, S Shankar Sastry, Sanjit A Seshia, and Ruzena Bajcsy. Towards trustworthy automation: User interfaces that convey internal and external awareness. In IEEE International Conference on Intelligent Transportation Systems (ITSC), pages 682–688. IEEE, 2016.
Katherine Driggs-Campbell and Ruzena Bajcsy. Communicating intent on the road through human-inspired control schemes. In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 3042–3047. IEEE, 2016.
Katherine Driggs-Campbell and Ruzena Bajcsy. Comparing datasets for generalizing models of driver intent in dynamic environments. In IEEE Intelligent Vehicles Symposium (IV), pages 1404–1409. IEEE, 2016.
Chi-Pang Lam, Allen Y Yang, Katherine Driggs-Campbell, Ruzena Bajcsy, and S Shankar Sastry. Improving human-in-the-loop decision making in multi-mode driver assistance systems using hidden mode stochastic hybrid systems. In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 5776–5783. IEEE, 2015.
Katherine Driggs-Campbell and Ruzena Bajcsy. Identifying modes of intent from driver behaviors in dynamic environments. In IEEE International Conference on Intelligent Transportation Systems (ITSC), pages 739–744. IEEE, 2015.
Katherine Driggs-Campbell, Victor Shia, and Ruzena Bajcsy. Improved driver modeling for human-in-the-loop vehicular control. In IEEE International Conference on Robotics and Automation (ICRA), pages 1654–1661. IEEE, 2015.
Katherine Driggs Campbell and Ruzena Bajcsy. Experimental design for human-in-the-loop driving simulations. 2015.
Victor A Shia, Yiqi Gao, Ramanarayan Vasudevan, Katherine Driggs Campbell, Theresa Lin, Francesco Borrelli, and Ruzena Bajcsy. Semiautonomous vehicular control using driver modeling. IEEE Transactions on Intelligent Transportation Systems, 15(6):2696–2709, 2014.
Victor Shia. Real-time safe semi-autonomous control with driver modeling. 2014.
Katherine Rose Driggs-Campbell, Victor Shia, and Ruzena Bajcsy. Decisions for autonomous vehicles: integrating sensors, communication, and control. In Proceedings of the 3rd International Conference on High Confidence Networked Systems, pages 59–60. ACM, 2014.
Dorsa Sadigh, Katherine Driggs-Campbell, Ruzena Bajcsy, S Shankar Sastry, and Sanjit Seshia. User interface design and verification for semi-autonomous driving. In Proceedings of the 3rd International Conference on High Confidence Networked Systems, pages 63–64. ACM, 2014.
Katherine Driggs-Campbell, Guillaume Bellegarda, Victor Shia, S Shankar Sastry, and Ruzena Bajcsy. Experimental design for human-in-the-loop driving simulations. arXiv preprint arXiv:1401.5039, 2014.
Dorsa Sadigh, Katherine Driggs-Campbell, Alberto Puggelli, Wenchao Li, Victor Shia, Ruzena Bajcsy, Alberto L Sangiovanni-Vincentelli, S Shankar Sastry, and Sanjit A Seshia. Data-driven probabilistic modeling and verification of human driver behavior. Formal Verification and Modeling in Human-Machine Systems, 2014.
K Driggs-Campbell, V Shia, R Vasudevan, F Borrelli, and R Bajcsy. Probabilistic driver models for semiautonomous vehicles. Digital Signal Processing for In-Vehicle Systems, 2013.
